A) Caractéristiques techniques de la voiture autonome
Aujourd'hui, la voiture est un risque au sein de notre société.
Pour l'éviter, un nouveau concept de voiture commence à se développer de plus en plus.
Il a pour but de créer un véhicule étant capable de circuler seul, sans intervention humaine.
C’est la voiture autonome.
D'après le Commissariat aux Energies Alternatives (CEA):
Une “voiture 100% autonome” désigne un moyen de transport entièrement piloté par une intelligence artificielle. C’est à dire un véhicule capable de définir lui-même son trajet et d'interagir avec son environnement afin d'adapter sa conduite en fonction de la signalisation, du comportement des autres usagers de la route (y compris piétons) et d'événements inattendus comme la présence de travaux ou d’obstacles inhabituels.
L’intelligence artificielle (IA):
"L’IA est un ensemble des théories et des techniques développant des programmes informatiques complexes capables de simuler certains traits de l'intelligence humaine (raisonnement, apprentissage…)."
Cette nouvelle forme d'intelligence créé par l'Homme est très présente dans notre société. Considérée comme une nouvelle révolution dans l'Histoire, tout comme le téléphone, internet..., son application est aussi très utilisée dans le domaine de la voiture.
La voiture autonome est dotée de plusieurs types d'avancées technologiques, lesquelles évoluent en permanence.
Mais quelles sont ces techniques et comment fonctionnent-t-elles ?
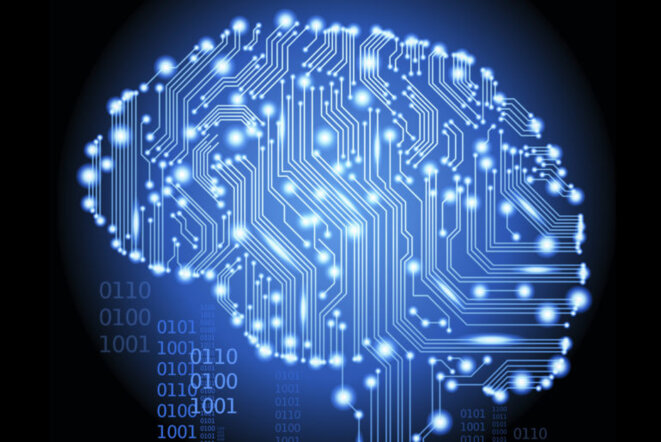
En effet, en reprenant la technique du "deep learning" ou "apprentissage profond" ce domaine de l'IA est "un ensemble de méthodes d'apprentissage automatique tentant de modéliser avec un haut niveau d’abstraction des données grâce à des architectures articulées de différentes transformations non linéaires". C'est-à-dire une construction mathématique de notre cerveau, dans laquelle un réseau de neurones artificiels va apprendre à reconnaître un objet donnée.
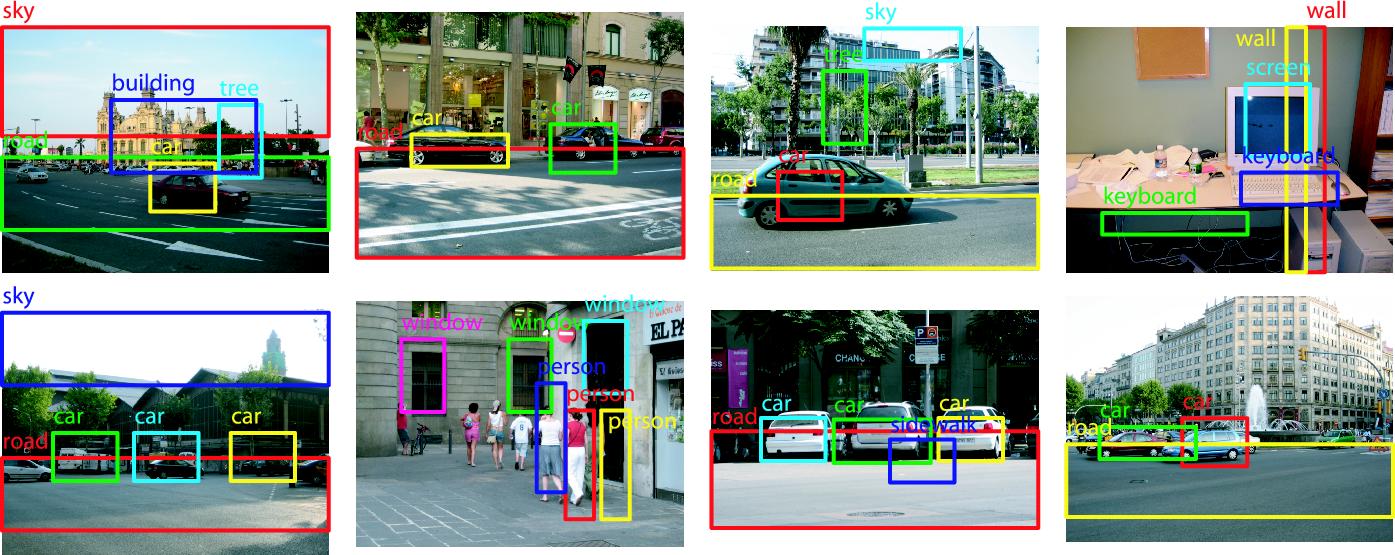
Dans le cas de la voiture autonome, on va lui apprendre à détecter les obstacles, les identifier puis les classer en fonction de ce qu'elle voit : panneaux de signalisation, feux tricolores, trottoir, piétons, bus, motos, voitures,... . L'objectif sera donc de remplir un maximum la base de données de la voiture, afin de la rendre plus sûre sur la route et de pouvoir prédire la position des autres véhicules et piétons. Elle pourra alors se repérer dans son environnement et rouler en toute sécurité.
Voici un exemple du deep learning utilisé dans la reconnaissance d'images, dans lequel on lui donne un algorithme lui permettant de retrouver les caractérisitiques de l'image donnée, puis grâce a cette liste de caractéristiques on pourra à l'aide d'un réseau de neurones reconnaître l'image :

Enfin, cette nouvelle technique apparue dans les années 2000 autorise la voiture autonome à prédire certains évènements sur la route et ainsi réduire le nombre d'accidents. L'utilisation de la reconnaissance d'objets ou "object recognition" est un très bon moyen pour voir comment les autres véhicules se déplacent, mais afin de détecter ces objets en mouvement nous avons aussi besoin d'autres types de matériels.
Capteurs
La vision est quelque chose de naturelle pour l'Homme, mais pour l'ordinateur "voir" n'est pas aussi simple, tel est le but de la vision par ordinateur, une "méthode permettant de détecter la présence d'une instance (reconnaissance d'objet) ou d'une classe d'objets dans une image numérique". La plupart des capteurs de la voiture autonome, pouvant etre considérés comme ses "yeux" lui sont très utiles pour se repérer dans son environnement et identifier ses obstacles.
Tous ces capteurs reprennent en général le système d'émission/réception. Ils vont donc envoyés un signal, puis le recevoir afin de déterminer la présence, la position des obstacles ou même leur vitesse par rapport à notre positionnement.
 ??
??
Capteurs ultrasons :
Il y en a en moyenne 12 dans le véhicule. Il reprend le système émetteur/récepteur copié des chauves-souris pour connaître leur distance par rapport à l'obstacle. Leur portée est d'environ 2 mètres et permettent notamment l'aide au stationnement du véhicule.
RADAR (Radio Detection And Ranging) :
Le RADAR est un système (émission/réception) d'ondes électromagnétiques qui permet de détecter la présence et de déterminer la position, mais aussi la vitesse des obstacles. Par exemple, lorsqu'une voiture double une autre, le radar sera capable de nous dire à quelle vitesse elle passe devant nous.
Domaines d'applications : météorologie, contrôle aérien et routier, l'armée (détecter les navires ou les objets volants comme les drones), aéronautique...
Caméras :
Elles sont efficaces, car elle permettent à la voiture de voir les couleurs, lire les panneaux de signalisation, repérer des obstacles dans un périmetre de 360 degrés. Cependant, leur utilisation est assez complexe, ce qui rend sa fiabilité un peu moins bonne (95%).
LIDAR (Light Detection And Ranging) :
Le LIDAR est un appareil qui fonctionne presque comme le radar. Il va cependant émettre un faisceau laser au lieu d'émettre des ondes électromagnétiques. C'est un instrument de télédétection (aucun contact avec l'objet étudié) et peut être utilisé dans le domaine du visible, de l'infrarouge et proche de l'ultraviolet. Il est donc très utile, car il peut agir la nuit ou quand les conditions météorologiques ne sont pas bonnes (brouillard, pluie...).
Domaines d'applications : topographie, géosciences, archéologie, securité routière...
Odomètre :
L'odomètre est un instrument de mesure qui permet de connaître la distance parcourue par un véhicule. Sa vitesse peut être mesurée en s'appuyant sur la circonférence de la roue et du nombre de tours réalisés.
?
Image du placement des capteurs dans une voiture autonome
Satellites
Plusieurs moyens existent pour notre déplacement et nous dire où est-ce qu'on se trouve. Nous avons ici deux exemples de système de positionnement connus qui permettent aussi aux véhicules de se repérer dans l'espace.
GPS (Global Positioning System) :
Ce système mondial de positionnement qui appartient au gouvernement américain met en orbite autour de la Terre 24 satellites situés à environ 20 200 km d'altitude. Elle permet donc à la voiture de connaître son géopositionnement en temps réel.

Exemple d'un itinéraire guidé par le GPS
Galileo :
Ce système de positionnement européen va mette en orbite 30 satellites situés en moyenne à 23 222km d'altitude autour de la Terre et devrait achever son déploiement vers 2020. Il serait capable de donner une précision de déplacement de 1m et permettre à l'Europe d'être indépendante en relation à sa géolocalisation.
![]()
Différents niveaux d'autonomies
D'après la classification de l’OICA (Organisation Internationale des Constructeurs Automobiles) l’autonomie d’un véhicule se base sur 5 niveaux. Nous avons retrouvé sur le magazine des "défis du CEA" (Commissariat à l'énergie atomique et aux énergies alternatives) sur "Le véhicule roule vers son autonomie" ce classement :
-
Niveau 0 : Conduite manuelle
-
Niveau 1 : Conduite assistée (freinage ABS, régulateur de vitesse, le conducteur peut être dispensé de la commande par les pédales)
-
Niveau 2 : Conduite partiellement automatisée (centrage automatique sur la voie, assistance à la trajectoire, le conducteur peut ponctuellement lever ses mains du volant)
-
Niveau 3 : Conduite conditionnellement automatisée (trajectoires et manoeuvres automatisées avec système d’alerte, le conducteur peut ponctuellement ne pas regarder la route
-
Niveau 4 : Conduite hautement automatisée (conduite et surveillance de l’environnement automatisée, le conducteur n’a plus à intervenir sur autoroute)
-
Niveau 5 : Conduite totalement automatisée (ce véhicule autonome peut circuler sur tout type de routes)
Où en sont les entreprises aujourd'hui?
Aujourd’hui les constructeurs n’en sont arrivés qu’au troisième niveau, mais selon une étude du cabinet américain McKinsey cette nouvelle gamme de voitures représentera 15% du parc automobile mondial en 2030. Des entreprises comme Tesla et Google se sont déjà lancés dans ce projet. Voici deux exemples de leurs idées sur le véhicule de demain :
Tesla Model S :
Tesla offre des voitures électriques sportives et de luxe à ses clients. Un système de pilote automatique optionnel est apparu pour la première fois en 2014 dans le Model S. Elle donne la possibilité à la voiture d'avoir une conduite semi-autonome et des capacités de stationnement : centrage de voie, régulateur de vitesse adaptatif, stationnement en libre-service, possibilité de changer de voie automatiquement avec confirmation du conducteur, et possibilité de faire venir le véhicule dans un garage ou une place de stationnement.
Les technologies utilisés (capteurs) sont : 8 caméras (vision à 360°), un radar avant et douze sonars (couvrant également un 360° complet).
Tesla Model S

Google Car :
Google car est un projet qui a été lancé par Sebastian Thrun qui avait pour but de mettre en avant un véhicule électrique autonome. Celle-ci a reçue l'autorisation de rouler sur la voie publique de certains Etats americains avec un conducteur à l'arrière du volant en cas d'imprévues. Et ce n'est qu'en 2016 que celui-ci est devenu le projet Waymo, entreprise subsidiaire qui se base sur la technologie et le développement de voitures indépendantes.
Les technologies utilisés sont : le lidar, une caméra 360°, des radars, un récepteur GPS et des capteurs sur les roues motrices.
Cependant, ceci n'est pas encore facile pour les entreprises. Celles-ci ayant succombées à certains accidents, comme ce fut le cas le 18 mars 2018 entre un véhicule de l'entreprise Uber (Volvo XC90) et une piétonne. Roulant de nuit, la voiture s'est averée avoir eu un défaut dans son dispositif d'urgence désactivé. Elle n'a donc pas pu freiné et a heurté la victime à plus de 60km/h.
 Google car Waymo
Google car Waymo
Expérience voiture autonome
Comme nous l'avons vu, de nombreux moyens sont utilisés pour qu'une voiture puisse avancer toute seule. Pour voir comment celle-ci comprend son environnement, nous avons décidé de faire une voiture.

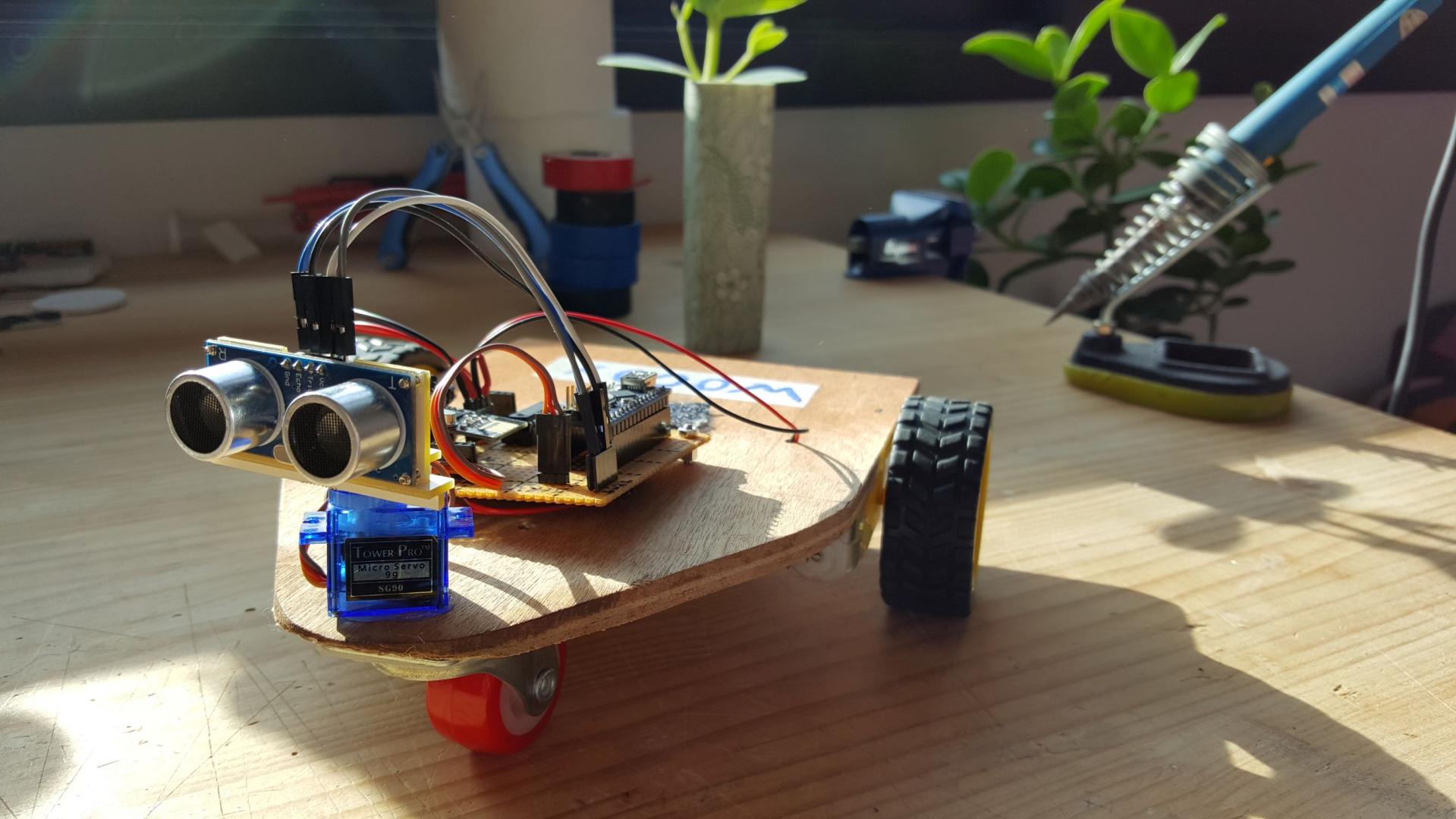
Pour cela, nous avons utilisé un capteur à ultrasons que nous avons mis sur un servomoteur.
Le capteur à ultrasons nous permet de mesurer une distance. Le servomoteur permet d'orienter le capteur où l'on veut.
Nous avons employé une carte programmable (Arduino), pour calculer les distances et contrôler les roues, alimentées par une batterie 12V.
Pour le programme, nous avons dit à la voiture de s'arrêter lorsqu'elle rencontrait un obstacle à 10cm d'elle. Ensuite nous lui avons dit de regarder la distance donnée à gauche puis à droite. Si la distance à gauche est plus grande que celle de droite, alors la voiture se dirige vers la gauche et si la distance à droite est plus grande que celle de gauche, alors la voiture se dirige vers la droite.

Bilan
Enfin, ces techniques sont essentielles pour la voiture autonome. Grâce à elles, elle est capable de se repérer dans l'espace, et reconnaître les obstacles. Mais ces technologies ont aussi des inconvénients.
Voir la suite...